



















































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































 02
03
02
02
03
02
 01
01
 02
02
 03
03
 04
04
 01
02
01
02
03
01
02
01
02
03
 04
01
02
03
04
01
02
01
02
03
04
01
02
03
04
04
01
02
03
04
01
02
01
02
03
04
01
02
03
04
 01
02
01
02
 03
04
01
03
04
01
 02
03
04
02
03
04
 01
02
03
04
01
02
03
01
02
03
04
01
02
03
 04
04
 05
06
01
02
03
04
05
05
06
01
02
03
04
05
 06
01
02
03
04
05
06
06
01
02
03
04
05
06


 01
02
01
02



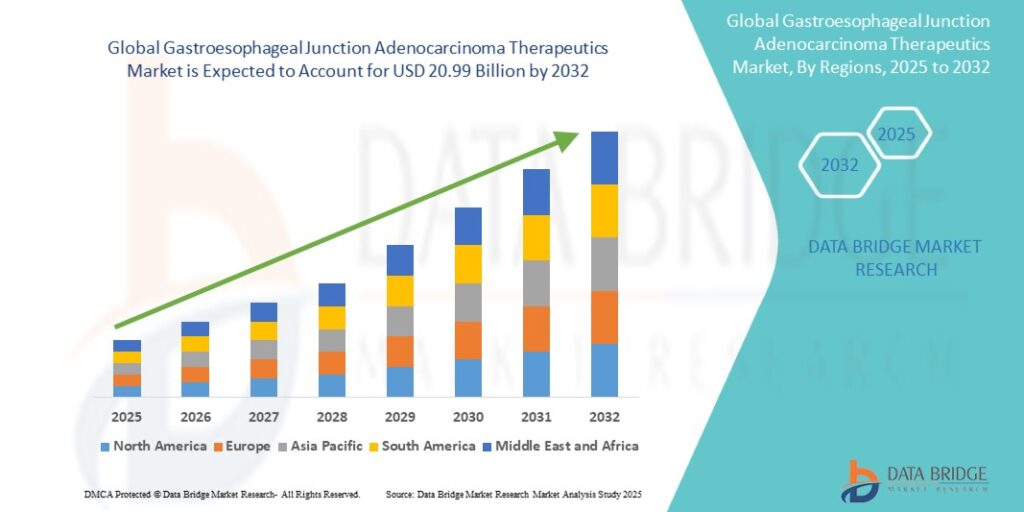
The global financial ecosystem is rapidly transforming as digital payments become the preferred mode of transaction for individuals and businesses
Bentleigh is one of Melbourne’s most in-demand suburbs, known for its family homes, modern renovations, leafy streets and strong community
WooCommerce Product File Uploads – Empower Your Customers With Customization Personalization, or being able to take custom orders, is arguably
How to Use WooCommerce Hide Out of Stock Products to Keep Your Store Clean and Convert More Keeping an online
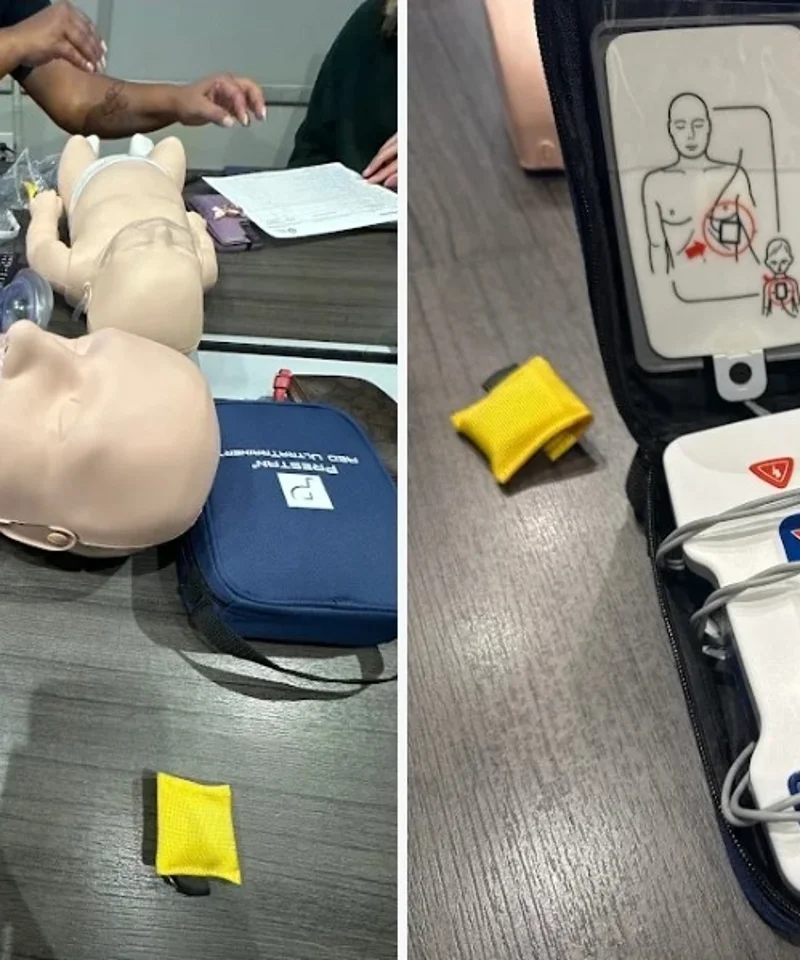
Fitness has shifted dramatically over the last few years. People want smarter ways to stay active, especially methods that save
London has rapidly become one of the world’s most powerful and influential technology hubs. From finance and retail to healthcare
In today’s world, ensuring the safety of students and staff is a top priority for educational institutions. Installing CCTV for
If you’ve ever tried downloading YouTube videos, you already know the struggle: slow websites, annoying ads popping up everywhere, and
A modern kitchen is the heart of every home, and choosing the right cabinets can make all the difference. Luxury
In the fast-paced real estate market of Dubai, standing out online is crucial. With thousands of property listings and real
In today’s digital world, content is the backbone of every successful online presence. Businesses in the UAE are increasingly realizing
Maintaining clean air ducts is essential for any home or commercial property in Dubai. Over time, dust, debris, and allergens
Reliable Car Recovery in Motor City, Dubai – A Complete Guide to Fast & Safe Towing Breakdowns never come with
Enhance your store with a WooCommerce product gallery slider. In this highly competitive world of eCommerce, the way you present
For any brand selling handmade or commercial soaps, high-quality packaging plays a major role in how customers feel about the


This may be the latest case of post aggression emigration in Ukraine. But it is unlikely to be the final stage for millions of people to leave the country. These people do not want
 English
English